728x90
반응형
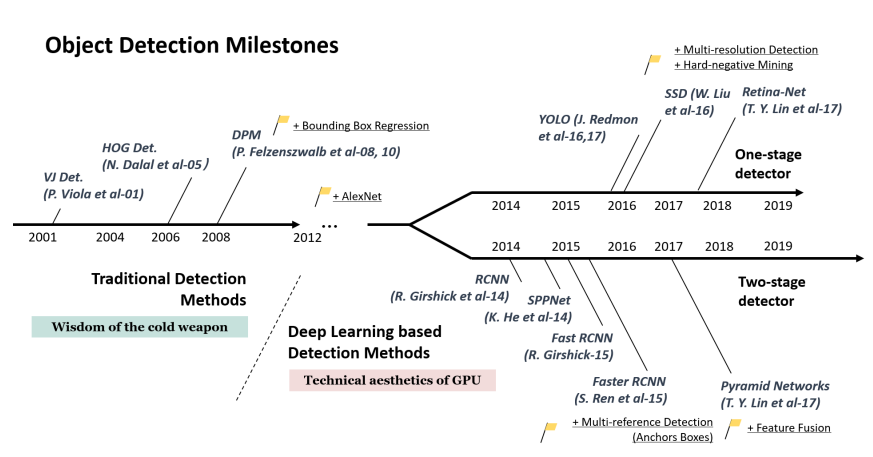
two stage의 큰 차이는 Region Proposal로 영역 추천하는 단계가 있는가의 차이이다.
- selective search
- RPN
- anchor box
=> feature map을 object detector에게 보내서 예측 수행
하지만 최신모델인 faster RCNN도 수행속도가 7fpn이나 걸린다.
그래서 시간을 줄이기 위해 one step detector 연구가 시작됨
=> yolo가 등장하는데 4배의 시간단축 성공함. 하지만 mAP가 떨어짐
이후의 SSD는 당시 YOLO보다 수행속도도 빠르고 mAP도 높은 모델로 등장함.
그리고 YOLO는 독자적인 모델로 지속적으로 개선을 해냄. V5까지
RetinaNet은 수행속도는 조금 낮지만 정밀도에 집중한 모델
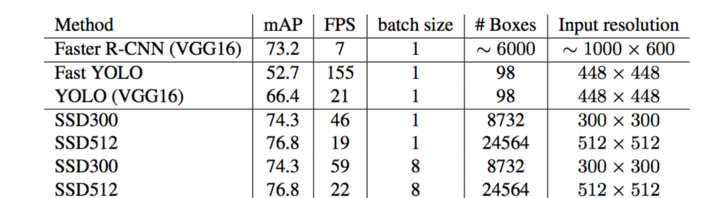
fps가 높을수록 빠른 수행속도, mAP가 높을수록 높은 정밀도
SSD Network 구조

VGG같은 CNN으로 결과로 나온 scale이 작은 feature map에서 추출한 anchor box에 기반한 detection model 임
주요구성요소로 1) MultiScale Feature Layer, 2) Default(Anchor) Box 등임
특히 Default Anchor box가 one step detector에 큰영향을 끼침
반응형
'Computer_Science > Computer Vision Guide' 카테고리의 다른 글
| 6-3. SSD 네트웤 구조, Multi scale Feature Map, Anchor box (0) | 2021.10.19 |
|---|---|
| 6-2. MultiScale feature map, Default(feature) map (0) | 2021.10.19 |
| 5-11~12. coco형태 BCCD데이터 학습 - 테스트 데이터 세트 inference, evaluation (0) | 2021.10.19 |
| 5-9~10. coco형태 BCCD데이터 학습 - VOC형태를 COCO형태로 변환 (0) | 2021.10.19 |
| 5-8. mmdetection inference (0) | 2021.10.18 |